凯瑞机器人“具身智能机器人测评关键技术及装备”成功入选“智能制造装备创新成果”
- 外汇
- 5小时之前
0 - 4
11月7日,2025汽车技术与装备发展论坛在江苏省苏州市举行。会上,“装”点未来——2025年度“引领汽车技术与装备发展”创新成果名单正式公布。重庆凯瑞技术有限公司(下称“凯瑞机器人”)“具身智能机器人测评关键技术及装备”成果,凭借在机器人动态性能精准表征与测评技术、可快速重构视觉多光谱动态训练场、大范围定位与运动智能一体化综合测试场等方面取得重大突破和创新,成功入选“智能制造装备创新成果”。
该项目研制了系列试验装备及标准规范,累计已为KUKA、新松、、、华数、遨博、珞石、固高、秦川、五八智能、等300多家具身智能机器人整机及零部件知名企业提供检测技术服务。该项目成果支撑了国家工信部第十届“创客中国”智能仿生机器人大赛的成功举办,取得了显著的社会效益。
关键技术指标及主要创新点
第一,行业首创可快速重构的机器人视觉多光谱动态训练场。
基于24通道LED阵列组合方法,该项目提出了照度-色温-光谱精准耦合与协同控制技术,攻克了极端环境光复现难、标准环境光不均匀等难题,研制了机器人视觉多光谱动态训练场,实现了380-780nm全波段、0-30000lux宽照度、90%以上均匀性与拟合度的环境光高精度复现,提出了多方向、大角度复杂姿态模拟技术,突破了多自由度、高速度与高精度运动控制技术,实现了最大速度5m/s、最大角速度30°/s、角度精度±0.02°的视觉感知目标运动性能,首创了可精准复现、快速调用的典型/极限光环境模型库,覆盖15种以上光照类型,实现了具身智能机器人视觉动态训练数据集的批量衍生与快速重构。
第二,自主研制机器人大范围定位与运动智能一体化综合测试场。
该项目创新提出了多激光雷达融合感知技术、模型匹配及数据融合算法,攻克了改良型PointPillars算法、ICP算法等关键技术,实现覆盖面积超1000㎡、同步追踪目标128个、位置精度3cm、角度精度3°的大范围高精度定位性能。提出了人形、四足、轮式、协作等10余种具身智能机器人运动智能表征指标与评价技术,构建家居、办公等5种全域可切换的1:1高仿真运动智能测评实物场景库,融合场景动态变换与三维数字地图快速重建技术,建成机器人大范围定位与运动智能一体化综合测试场,建图精度优于2cm,解决了常规测试装备测量范围不足、跟踪目标单一,通用测试场场景切换难、人工视检效率低、测评结果误差大等难题,填补了行业空白。
第三,创新提出机器人动态稳定性等系列测试方法,制订国际/国家标准16项。
该项目创新性提出了末端抖动频率、末端抖动幅度、停位点稳定性、停位点抖动幅度等4项核心参数及其测试方法,攻克了工业机器人生产环节中存在的性能衰减、末端震颤、异常声振等稳定性测评难题,实现了覆盖从高动态响应到低能耗场景的动态稳定性评估,制定了《工业机器人 动态稳定性试验方法》国家标准,填补了ISO9283等国际标准在动态性能评估方面的空白;建立了工业、服务等5大应用领域具身智能机器人测评指标体系框架,细化典型检测指标试验要求及条件,形成国际/国家标准规范16项,为行业提供具备统一性、规范性和公信力的试验标准体系,推动了国产机器人从“能用”向“好用”升级。
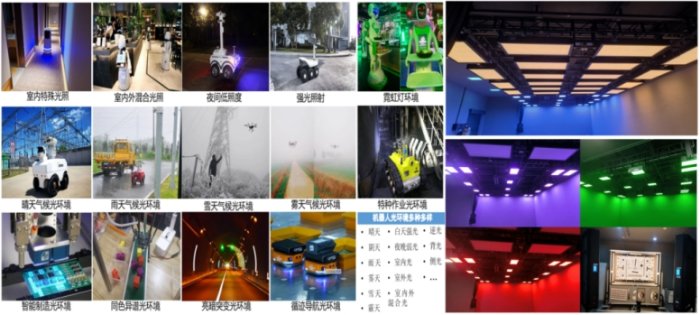 图1 可快速重构机器人视觉多光谱动态训练场
图1 可快速重构机器人视觉多光谱动态训练场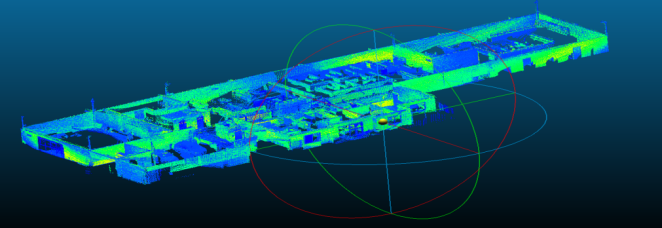
 图2 机器人大范围定位与运动智能一体化综合测试场
图2 机器人大范围定位与运动智能一体化综合测试场在项目成果推广价值方面,该项目研制的训练场等系列装备综合考虑了光照、振动、速度、角度、姿态等多因素耦合工况,能够满足室内外机器人大多数工况要求,解决了具身智能机器人动态性能评估难、复杂工况模拟难、智能测评场景缺失等行业痛点问题,相关成果服务了300多家具身智能机器人整机及零部件主流企业,新增直接经济效益10157万元,支撑了工信部“创客中国”等行业重要赛事,前期已经取得了显著的经济和社会效益。
随着具身智能机器人高端应用领域的拓展,其未来必将面临更多更为复杂的场景/工况,而该项目系列测试装备具有可快速重构、模块化可重组、全域跟踪监测等技术特点,仅需通过部分模块的升级迭代,即可满足新增复杂场景需求,具有巨大的应用潜力;除机器人领域外,该项目研制的可快速重构视觉多光谱动态训练场还可应用于车载摄像头成像质量测评、全景图像拼接质量测评、车身颜色标定等新能源汽车关键部件测试评价,提升汽车行业制造水平。

